Rolf
Rolf is a simulation program for calculating the roll motion of symmetrical monohull vessels in regular waves or seaways. It is specifically designed to calculate roll motions with large amplitudes. The calculations are performed in the time domain.
Introduction
The seakeeping code Rolf is a reprogrammed version of the program ROLLS widely used in Germany [1].
The algorithm treats the roll motion in a non-linear way, while the remaining degrees of freedom are calculated by a linear method, making the computation extremely fast and at the same time reliable. For large roll amplitudes a linearization of roll motion is not suitable, as the restoring roll moments are highly dependent on the actual roll angle. As the buoyant force significantly fluctuates, influenced by pitch and heave motion, disregarding these motions is deemed to be inadequate. Rolf calculates those motions in a linear way and considers the influence to roll motion by this approximation. The roll motion is computed in time domain mainly using the linear wave exciting moments, a non-linear roll damping approach and the non-linear righting lever curves of static stability in waves. Furthermore, the coupling of the roll motion with sway and yaw motions, the roll moment caused by the roll accelerations and the vertical acceleration of the ship changing the water pressure is considered.
Before doing the non-linear computations with Rolf, a database of linear response amplitude operators for surge, sway, heave, pitch and yaw motions as well as the wave exciting moments are computed with module Strip. A further database of righting lever curves in waves of various heights for hogging and sagging conditions is computed with the module Hyd for a variety of floating conditions (variation of draught, trim and heeling angle).
The time domain simulations are carried out by interpolating within these pre-computed databases and using the so called ”effective wave” for the interpolation of righting levers and solving the set motion equations. The concept of the effective wave means that any time the undisturbed (without the present of the vessel) irregular water surface along the midship plane is approximated by an effective wave contour which has nearly the same righting lever curve as the irregular wave contour.
The nonlinear roll damping of the ship hull is set by roll damping coefficients which depend on the roll motion amplitude and the ship speed. The coefficients are derived from model test results with similar hull forms, wizards or module Ikeda. The damping effects of box and bilge keels, mainly caused by vortex shedding, can be taken into account with the same method applied in the module Strip.
The effects of passive or actively controlled fin stabilisers, generating lift forces at oblique inflow angles at forward speeds and zero-speed, are directly considered in the simulation. The active control of movable fins can be realistically simulated by the damping and restoring gain as well as the maximum fin speed and angle.
The flow in anti-roll damping tanks can be computed in the time domain applying the ship motion at the tank positions, see modules FS-Tanks and U-Tank.
The program Rolf does not include wind heeling moments and is not able to simulate broaching and surf-riding, but can accurately predict parametric rolling and considers the non-linearity of the righting lever curve for large roll angles.
Application
The application of Rolf is primarily in simulations where non-linear effects of roll motion are of main importance. This is especially the case where roll angles are high (exceeding 10 to 15 degrees), where linearization of the static roll moment is not suitable already for smaller roll angles or where the fluctuation of lever arm and righting moments is significantly high between hogging and sagging situation.
Results
Results of Rolf are mainly time series of ship motions in all degrees of freedom, especially the roll angle, in waves, long- or short-crested seaways. Additional possible outputs are motion displacements, velocities and accelerations in user-defined locations. Furthermore, a statistical evaluation of the obtained data is possible. Calculations in Rolf are also possible in loops of various encounter angles, ship speeds and regular waves or seaways.
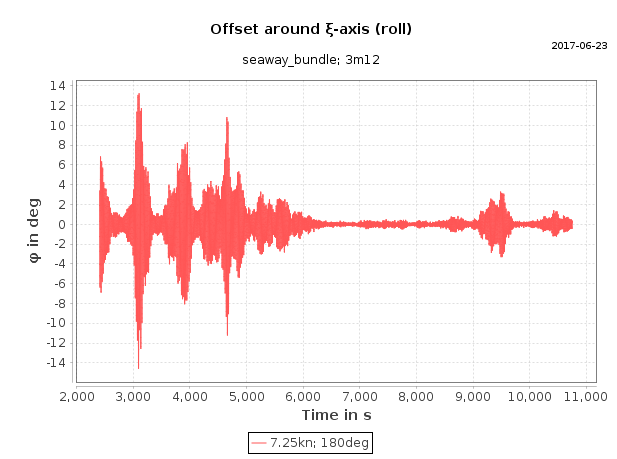
The diagram of figure 1 shows the calculated time series of the roll angle, revealing events of parametric rolling.
Rolf’s loop calculation function helps to calculate various combinations of ship speed, encounter angle, wave or seaway height.
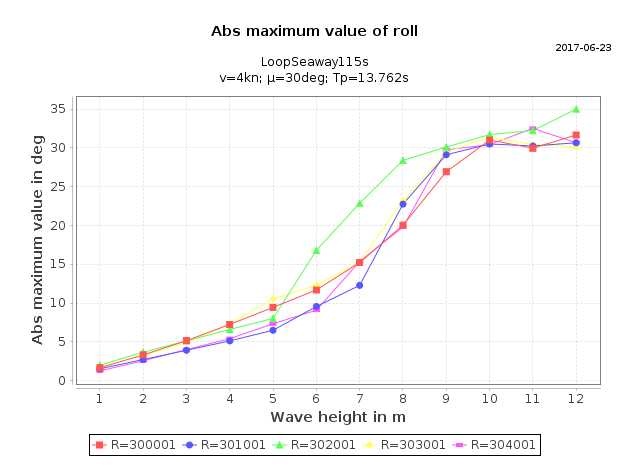
Rolf considers a specified number of different realizations of the same seaway and automatically loops the calculations. The following figure 2 gives the calculated roll angle depending on wave height for five different realizations of the same seaway. It reveals clearly the non-linearity of roll amplitude with increasing wave heigth in this calculated case.
References
[1] Söding H., Shigunov V., Zorn T., Soukup P.: Method rolls for Simulation Roll Motions of Ships; Ship Technology Research Schiffstechnik Vol. 60, May 2013.