FS-Tank
FS-Tank is a simulation program for calculating the flow in free surface anti-roll tanks, which was specially developed for the use in seakeeping programs.
Introduction
Free surface tanks are in general rectangular and extend over the whole width of the ship. They are assumed to be shallow, i.e. the breadth of the tank is larger than the filling level (approximately 10 times greater). Thus, the flow can be described with so called hyperbolic shallow water equations and the flow in transverse direction of the ship is considered to be one-dimensional. A typical phenomenon in shallow water is the formation of steep waves, also called hydraulic jumps. In the computation this is taken into account by special treatment of the spatial derivations [1, 2].
To account for sloshing against the tank top, the equations are extended with forces that suppress fluid elevations higher than the tank top. Furthermore bulkheads/obstructions are considered with pressure loss coefficients and by lowering the cross section of the tank. The pressure loss coefficients have to be adjusted according to model tests or data base of comparable designs. Uneven tank bottoms or tank covers as well as bottoms which fall dry during the motion can be approximated by the computation. The formula used allows the calculation of a variable tank length (in the longitudinal direction of the ship).
A finite volume method is used to solve the equations of conservation. For this the tank is discretized into a number of numerical cells distributed over its width. The time is subdivided into discrete time steps.
Application
The FS-Tank module is used to define the tank geometry and flow parameters. Wizards help to design the tank correctly. Figure 1 shows an example of the discretised fluid domain.

Results
For Rolf calculations, the tank geometry is automatically integrated and the flow is simulated in the same way as the roll motion. The tank moment m, caused by the moving water mass is determined and added to the roll equation.
For Strip, preliminary calculations are required to integrate the results into the frequency domain. In order incorporate easily the calculated tank moment in the linear strip method the tank moment m' is defined. In doing so the mass matrix of the ship used in the program does not have to be modified for the tank. The tank moment m' is the total tank moment m subtracted by the moment produced by the ”frozen” fluid. The frozen fluid with initial position at rest represents the moment in the tank if the fluid does not move relative to the tank. The remaining moment m' then describes the differences between the total moment due to the movable fluid and the moment due to the frozen fluid taken into account elsewhere.
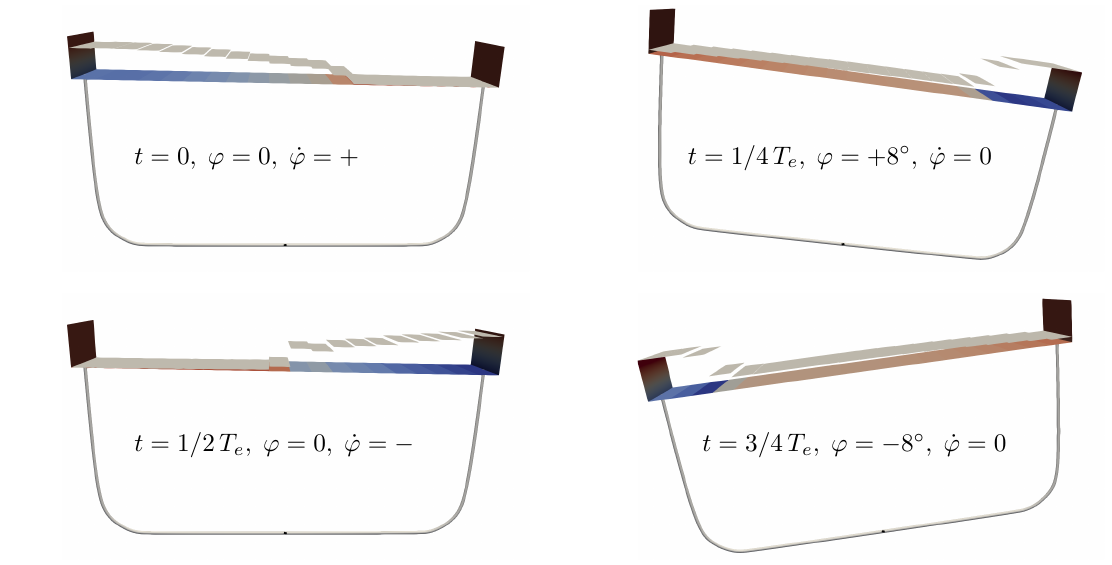
Many computations with a tank were carried out, covering different roll amplitudes and frequencies. During these simulations the tank oscillates with respect to an assumed roll-axis fixed on the ship. The roll angle φ of the tank is
| φ = φ̂ sin(ωt) | (1) |
with angular frequency ω of the roll motion. Every single computation leads to a time history of the roll moment m' of the tank. This signal is decomposed with a Fourier analysis to
| m′ ≈ A1 cos(ωt) + B1 sin(ωt) | (2) |
where A1 is the amplitude of the damping part with a phase shift of 90° relative to the roll angle. Effects of the hydrodynamic mass and the stability loss due to the free surface are summed up in B1.
In the linear strip program the amplitudes A1 and B1 are added to the equation of motion in order to include the tank effect.
As the functions A1 and B1 dependent strongly on the roll amplitude due to the non-linear behaviour of the tank effect, the strip method calculations have to be performed for several and suitable roll amplitudes.
Figure 2 shows an example of a flow animation.
References
[1] Schumann C.: A Simple Idea to Calculate Shallow Water Flow with Steep Waves; Proceedings of the Tenth Workshop of Water Waves and Floating Bodies 1995, Editor R.E. Taylor, pp. 217-220.
2] Schumann C., Pereira R.: Non-linear effects of roll damping tanks on ship motions, OMAE2006-92244, pp. 291-300, 25th International Conference on Offshore Mechanics and Arctic Engineering, Hamburg, Germany, 2006.
[3] Schumann C.: Ein Programm zur Berechnung der Strömung in Frahm’schen Schlingerdämpfungstanks; Report No. 627 TU Hamburg-Harburg, Schriftenreihe Schiffbau, February 2004.